November 2021
Die Robotik erlebt einen Boom und die mobile Robotik spielt dabei eine Schlüsselrolle. Immer mehr Anwendungen nutzen die Möglichkeit, sich in einer verändernden Umgebung selbständig zu bewegen und zu orientieren. Dieser Trend zeigt sich aktuell etwa durch den rasant wachsenden Online-Handel in der Logistik. Doch wie lassen sich diese komplexen Anwendungen möglichst effizient realisieren? Helbling demonstriert mit einem Show Case, wie dank industrialisierter Komponenten autonome Navigation mit überschaubarem Aufwand umgesetzt werden kann.
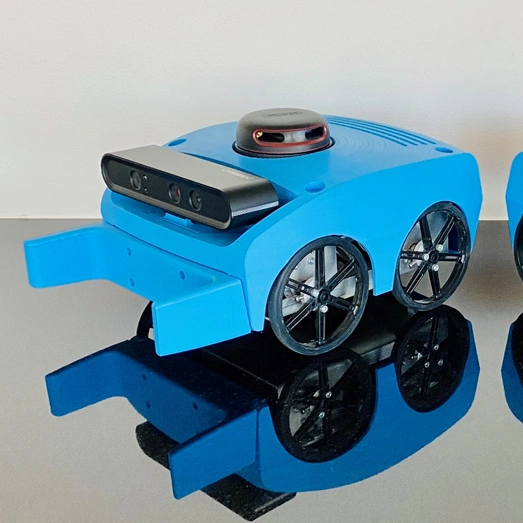
Er heisst HelMoRo, kommt aus dem 3-D-Drucker und kann Objekte autonom auffinden und manipulieren. Der "Helbling Mobile Robot" wurde in den vergangenen Monaten von Helbling-Ingenieuren mit agilen Methoden entwickelt und gilt als Show-Case. Bei dieser Plattform kommen kommerziell verfügbare Komponenten und Software-Bausteine zum Einsatz. Die Experten stecken damit ab, welche Robotik-Lösungen für komplexe Zusammenhänge mit vertretbarem Aufwand und Risiko möglich sind. Denn der Bedarf ist gross: Helbling entwickelt für Kunden aus unterschiedlichsten Branchen anspruchsvolle robotische Systeme. Dies beinhaltet als wichtiges Element die mobile Robotik, welche über die letzten Jahre in vielen Applikationen stark an Bedeutung gewonnen hat. Typische mobile Roboter sind selbstfahrende, führerlose Fahrzeuge und Drohnen.
Warum mobile Robotik?
Der Vorteil eines autonom navigierenden Roboters liegt darin, dass er sich frei von festen Installationen selbständig in einer sich ändernden Umgebung zurechtfinden und fortbewegen kann. Dies erlaubt die Automatisierung von Aufgaben in schwer zugänglicher, gefährlicher oder sich wandelnder Umgebung – zu Land, zu Wasser, in der Luft bis hin zum Weltraum.
Der Einsatz autonom navigierender Fahrzeuge ist aus der Logistik und automatisierten Fertigung nicht mehr wegzudenken. Auch in den Bereichen der Mobilität, der Inspektion und Aufklärung steigt die Bedeutung der autonomen Navigation. Dabei agiert der mobile Roboter als Träger von Sensoren und Aktoren, beispielsweise in der Landwirtschaft, wo mobile Roboter Unkraut identifizieren und selektiv entfernen, oder als Transportmittel für Waren und Menschen.

Was macht die mobile Robotik aus?
Ein Kernaspekt bei all diesen Anwendungen ist das autonome Orientieren und Navigieren in einer zumindest teilweise unbekannten und sich verändernden Umgebung. Genauer geht es um das Erkennen der Umgebung, das Aufbauen und Nachführen einer dynamischen Landkarte und schliesslich das Navigieren inklusive der Reaktion auf Abweichungen von der aktuellen Landkarte.
Je nach Applikation unterscheidet sich die Umsetzung dieser Teilaspekte. So bewegt sich ein AGV (Automated Guided Vehicle) in der Logistik meist auf ebenem Grund, oft in einer recht gut beschriebenen Umgebung. Dabei muss es jedoch auf Hindernisse reagieren und hohen Anforderungen an die Personensicherheit gerecht werden.
Eine Inspektionsdrohne in unbekannter rauer Umgebung muss hingegen die relevanten Aspekte der Umgebung laufend erfassen und eine digitale Landkarte mit der eigenen Position in Echtzeit erweitern. Dadurch kann sie den Weg zum Zielpunkt sicher bestimmen und Kollisionen vermeiden. Bei dieser Art der autonomen Navigation spricht man von SLAM (Simultaneous Localization and Mapping).
Die unterschiedlichen Einsatzgebiete erfordern eine abgestimmte Palette an Sensoren zur Erfassung der Umgebung, wie lasergestützte Sensoren (LIDAR), zwei- oder dreidimensionale Kamerasysteme sowie Ultraschall-Sensoren oder kapazitive Sensoren. Dazu kommen auf die Applikation ausgerichtete Algorithmen zum Einsatz. Sie ermöglichen die Auswertung und Fusion der Sensordaten für das Lokalisieren sowie das dynamische Planen des Weges zum anvisierten Ziel.


Auf was ist bei der Umsetzung zu achten?
Eine wachsende Palette industrialisierter Systeme und Komponenten erleichtert den Zugang zur mobilen Robotik. Das erleichtert, immer neue Anwendungsfelder zu erschliessen. Dies wiederum fördert die Standardisierung und Erweiterung der kommerziellen Lösungspalette.
Letztlich macht es die Entwicklung der letzten Jahre möglich, dass trotz hoher Systemkomplexität viele Anwendungen in Industrie, Logistik und Dienstleistung mit einem überschaubaren Aufwand und beherrschbaren Risiko realisiert werden können.
Was lehrt uns der Helbling Mobile Robot?
Es ist wie bei anderen Systemprojekten: Der Schlüssel zum Erfolg liegt zunächst in der genauen Kenntnis der Anforderungen an die Zielapplikation. Darauf ausgerichtet wird daraufhin die Systemarchitektur und geeignete Systemkomponenten werden evaluiert. Bei der Umsetzung liegt der Fokus auf Technologie- oder Prozessrisiken, welche frühzeitig und in schnellen Iterationszyklen verstanden und ausgeräumt werden müssen.
Um dies zu demonstrieren, hat Helbling einen Show Case konzipiert, in welchem unter Einsatz von kommerziell verfügbaren Komponenten und Software-Bausteinen die wesentlichen Elemente der autonomen Navigation in einer typischen Applikation umgesetzt wurden.
Entstanden ist eine Plattform für das autonome Auffinden und Manipulieren von Objekten – von seinen Entwicklern liebevoll HelMoRo (Helbling Mobile Robot) genannt. HelMoRo erfasst die Umwelt und baut sich selbstständig eine digitale Landkarte seiner Umgebung auf. Mit den Daten der optischen Kamera ist HelMoRo überdies in der Lage, Objekte zu unterscheiden und zu kategorisieren. Dabei tritt HelMoRo im ansprechenden und wandelbaren Designgewand aus dem 3D-Drucker auf.
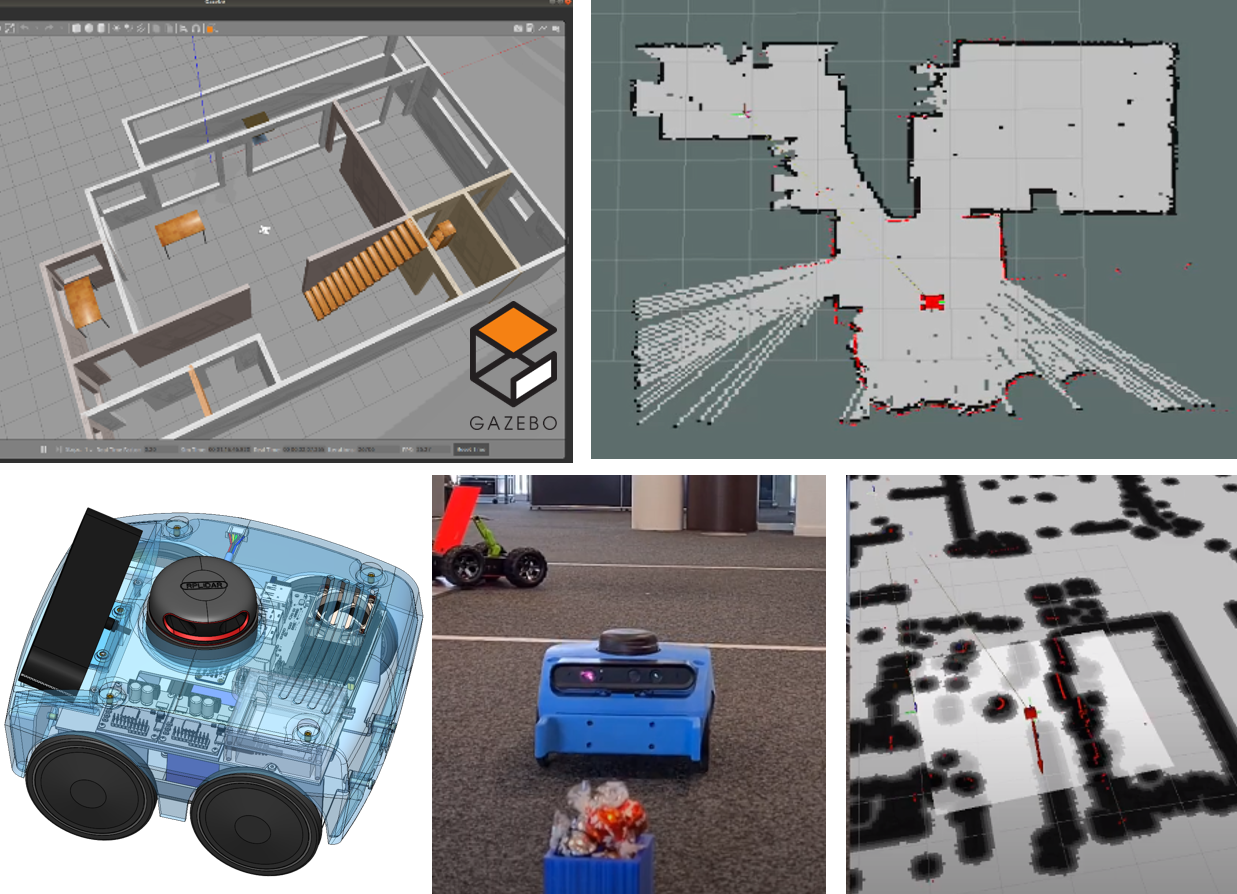
Entwickelt wurde HelMoRo mit agilen Methoden. Nach Definition der Zielapplikation und dem Erstellen des Systemkonzeptes erfolgte die Selektion der Schlüssel-Komponenten zur Navigation. Die Algorithmen für Objekterkennung, Mapping, Lokalisierung und Bahnplanung wurden in einer virtuellen Umgebung entwickelt, getestet und in ersten Loops optimiert (Digital Twin). Bei der laufenden Übertragung von Erkenntnissen in die physische Umsetzung nutzte das Team Rapid-Prototyping-Verfahren, welche eine schnelle Verifikation von Simulationsergebnissen und eine hohe Entwicklungsgeschwindigkeit ermöglichten.
Zusammenfassung: Helbling demonstriert den Einsatz der autonomen Navigation mit überschaubarem Aufwand und Risiko
Mit HelMoRo ist mit relativ kleinem Aufwand ein Demonstrator entstanden. Er umfasst in der Entwicklung die gesamte Kompetenzspanne von Helbling: von der Systemarchitektur über die Sensorik und Algorithmik, die Mechatronik bis hin zum Industrial Design. Das Beispiel zeigt letztlich, wie sich individuelle Robotik-Lösungen mit kommerziellen Bausteinen und einem erfahrenen Team effizient umsetzten lassen.