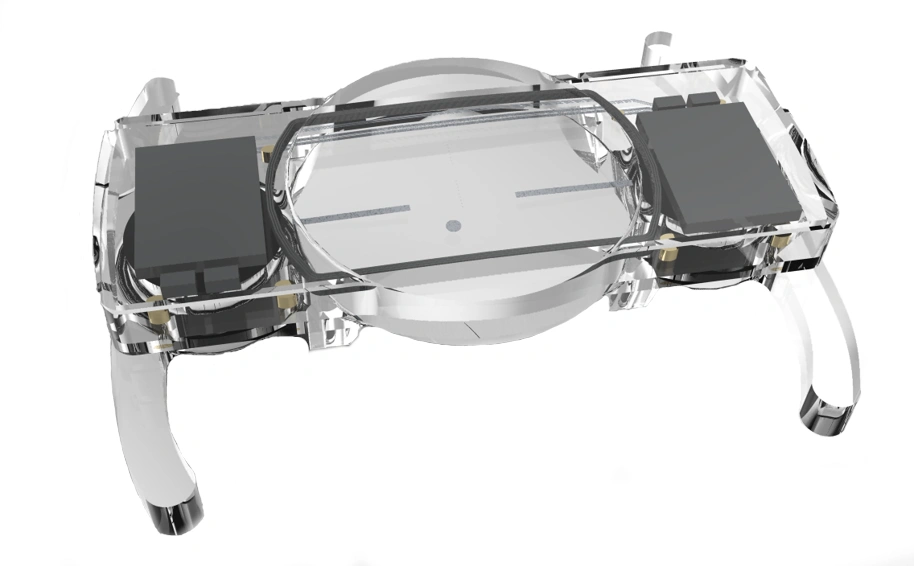
In response to the increasing need for reliable counter-drone defense solutions, CDDS—a recently founded Swiss-based startup—approached Helbling with an early-stage idea and an initial hardware prototype for a drone interception demonstrator.
Helbling was tasked with developing the critical vision and control algorithms necessary for autonomous drone interception at high velocities. The core challenge addressed was ensuring accurate guidance and interception under latency conditions and rapid relative velocities.
Services
Key Figures

Our Contribution
Helbling developed the autonomous interception algorithms, starting from the definition of core requirements through to successful real-life validation in close collaboration with CDDS.
Key Contributions
- Definition of core requirements and control architecture with a focus on low-latency guidance, robustness, cost-effectiveness and short development time
- Selection of camera and control hardware
- Simulation-based development of control software, structured into the following focus areas:
– Control: Interception control algorithm
– State Estimation: Kalman Filter fusion of IMU and
vision data
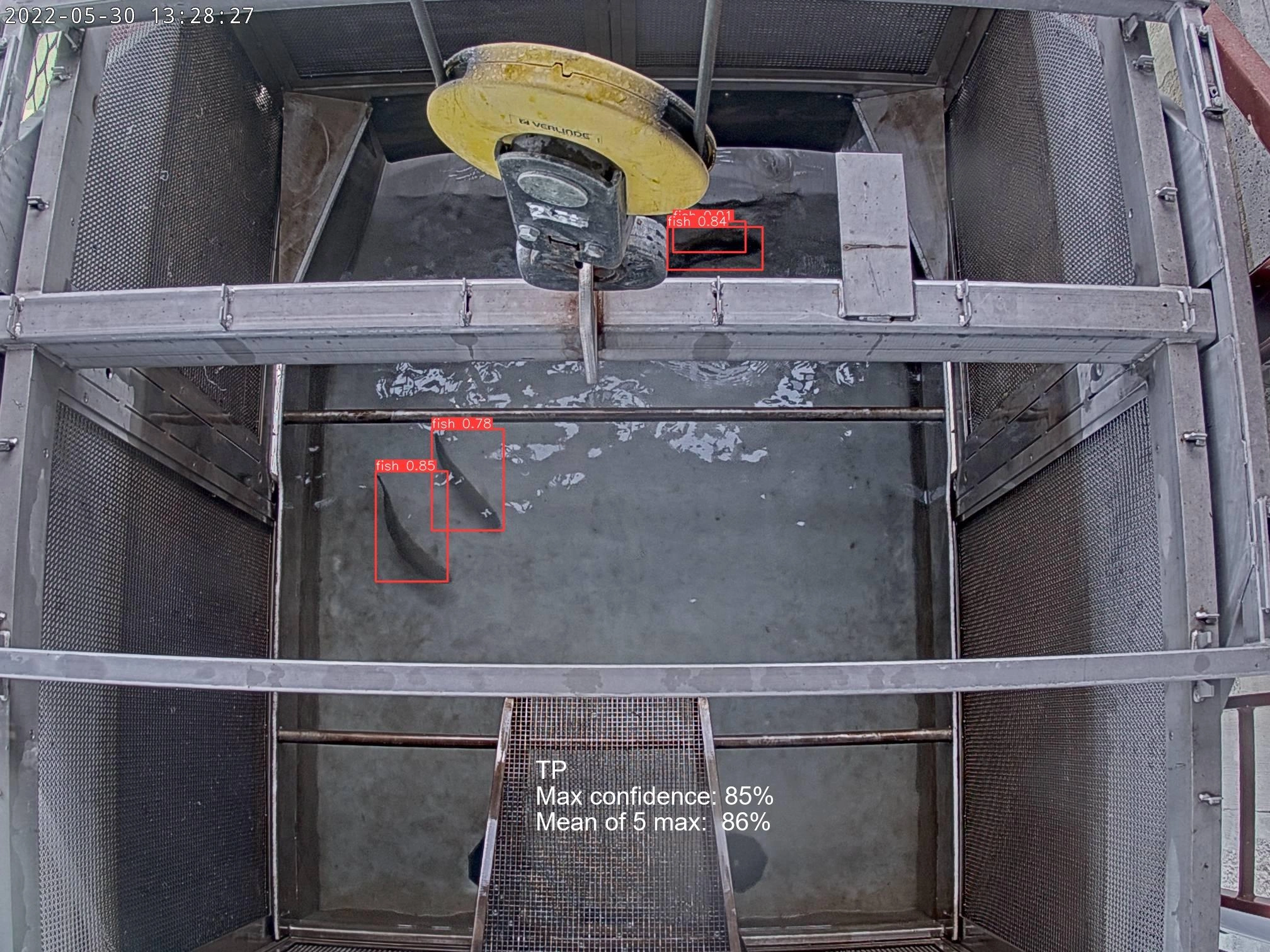
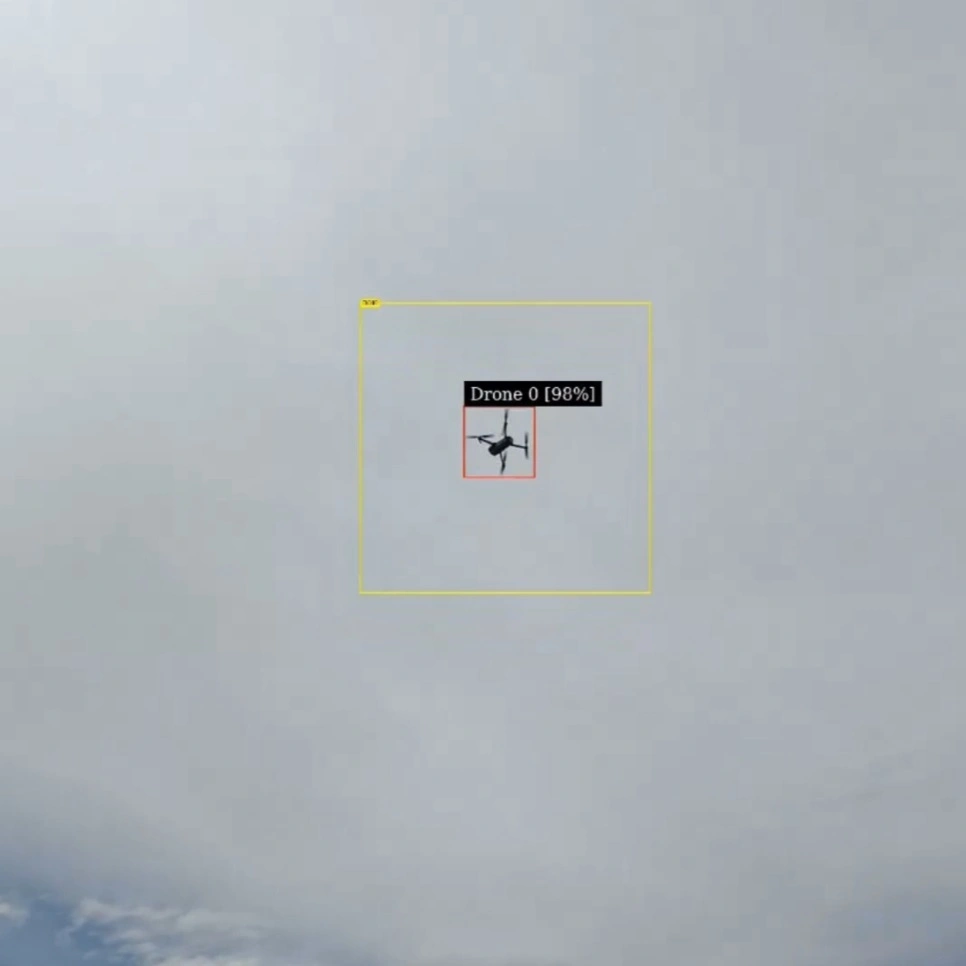
- Perception: AI-based drone detection and tracking
using YOLO neural network - Software integration on real drone hardware
- Field testing and finetuning
Development and testing results of C-UAV:
-> Click to play video below
Robotics tools and simulation framework
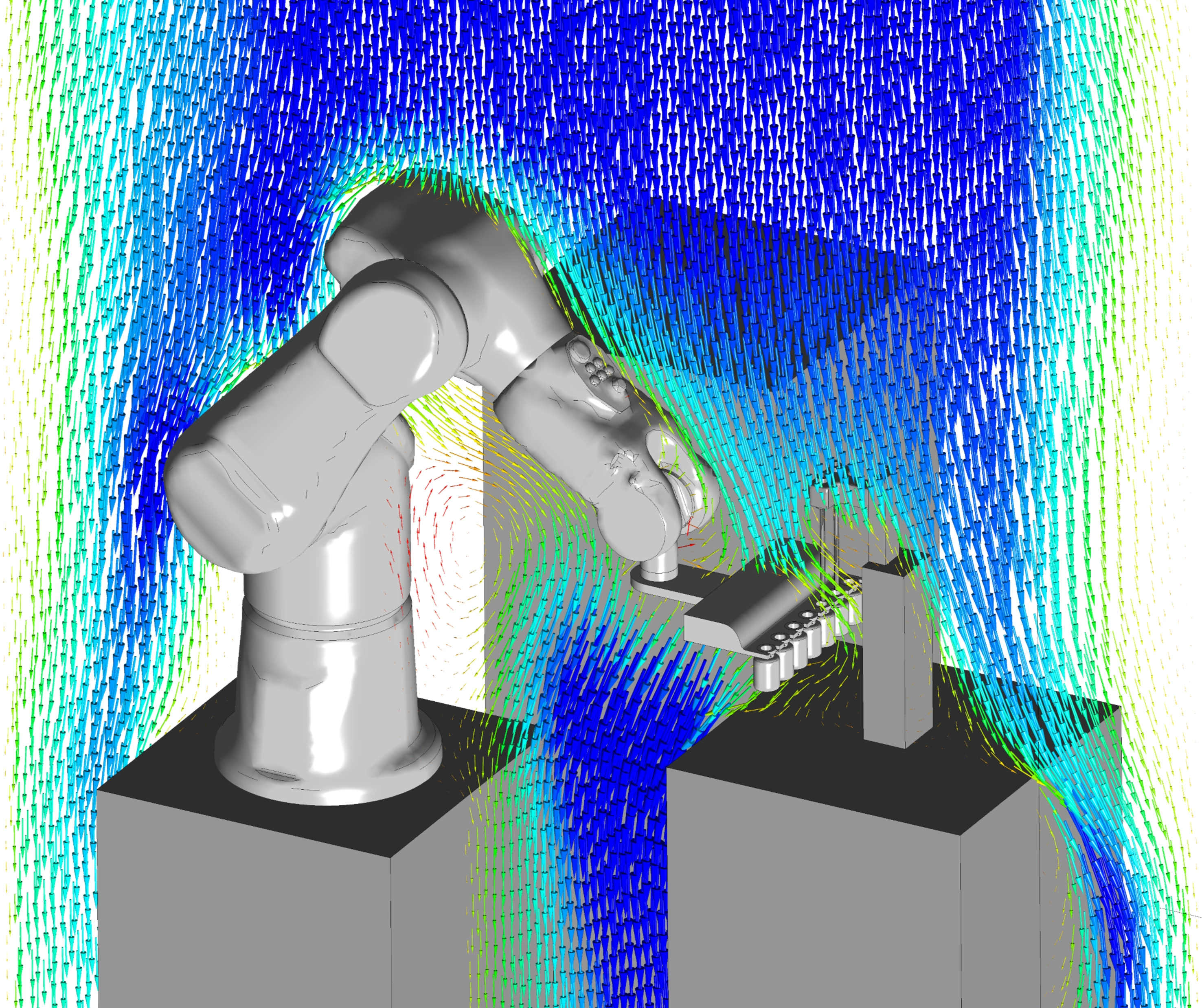
- A modular development in simulation based on Gazebo, ROS2 and a PX4 allowed rapid prototyping, parallel development and software in the loop testing
- Tools like Foxglove enable in-depth analysis of recorded data
- Custom tools supported efficient development
– Data driven result analysis and performance visualization
– Automated parameter tuning and latency impact studies
Outcome
Initial field tests demonstrated promising behaviour
- Successful real-time detection and navigation
- Increased performance by evaluating real sensor noise to tune the state estimator
- Successful validation of algorithms through autonomous hit in reality
Key Learnings
- Rigorous system engineering remains crucial especially in fast-paced, high-risk projects
- Simulation enhances development speed and is indispensable for effective debugging, validation, and safe iteration
- Tight interdisciplinary collaboration between software, control, and hardware experts accelerated decision-making and resolved integration challenges

Contact






























































































Cases
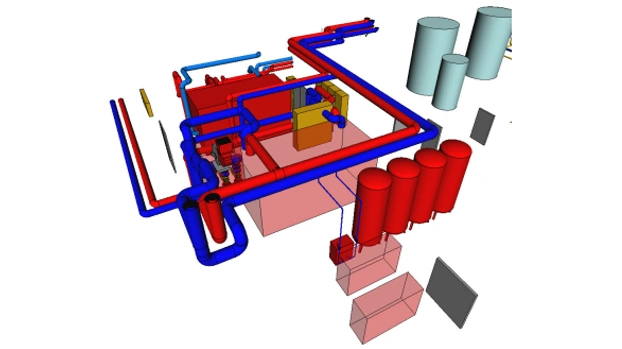
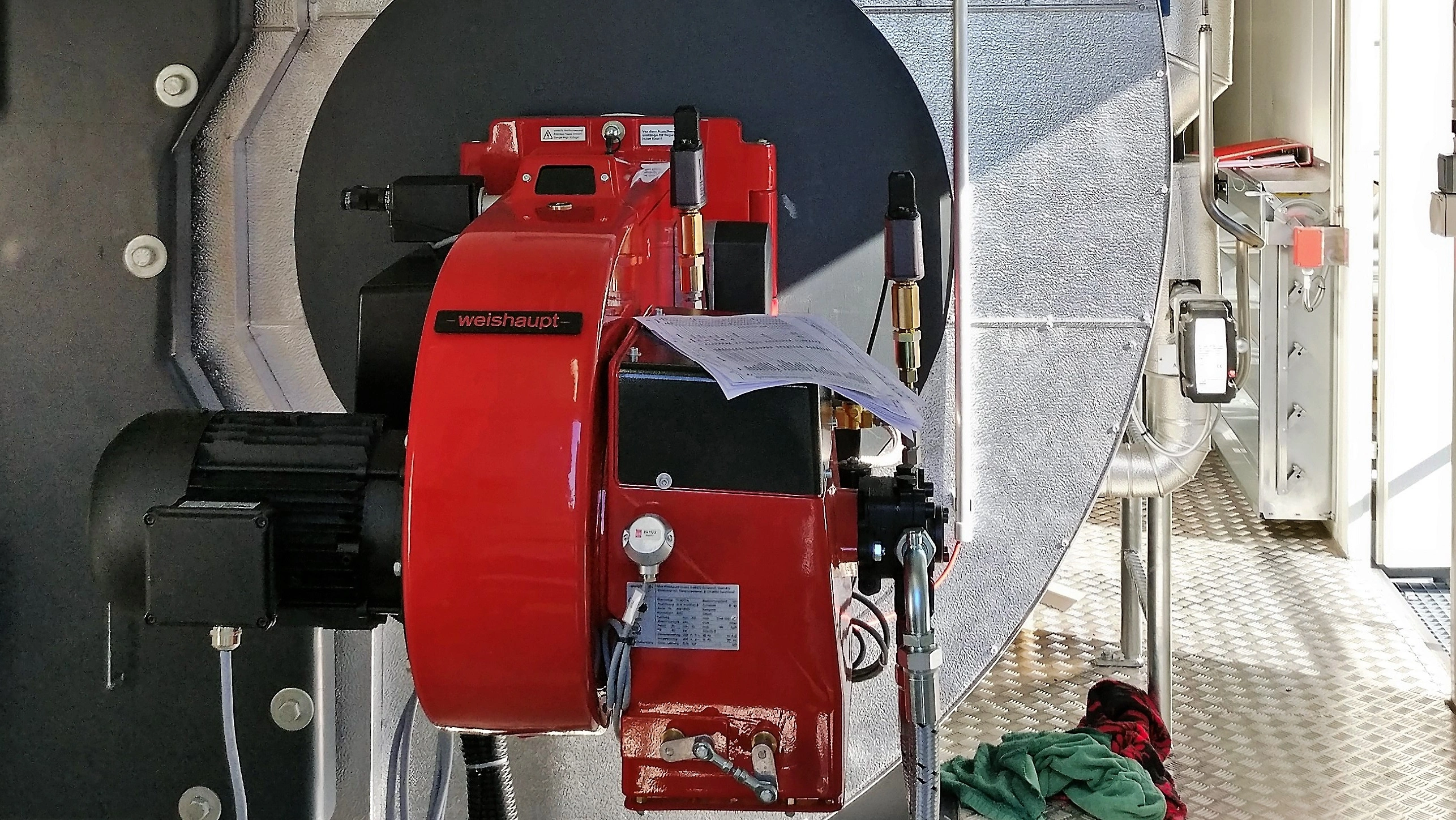
Internationales Unternehmen der Papierindustrie – Analyse des Dampfsystems
Industries:
Services:
























Cases
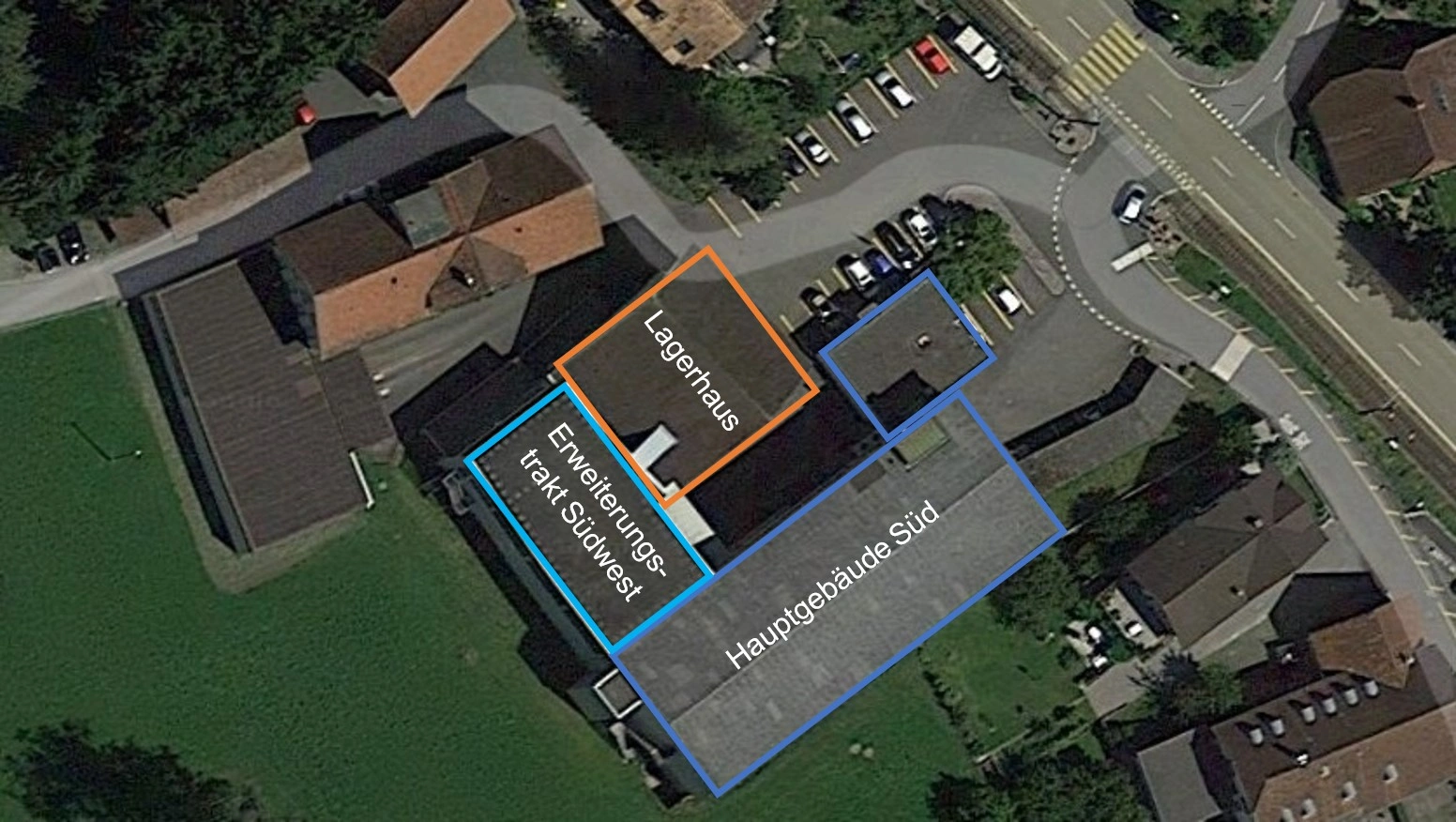
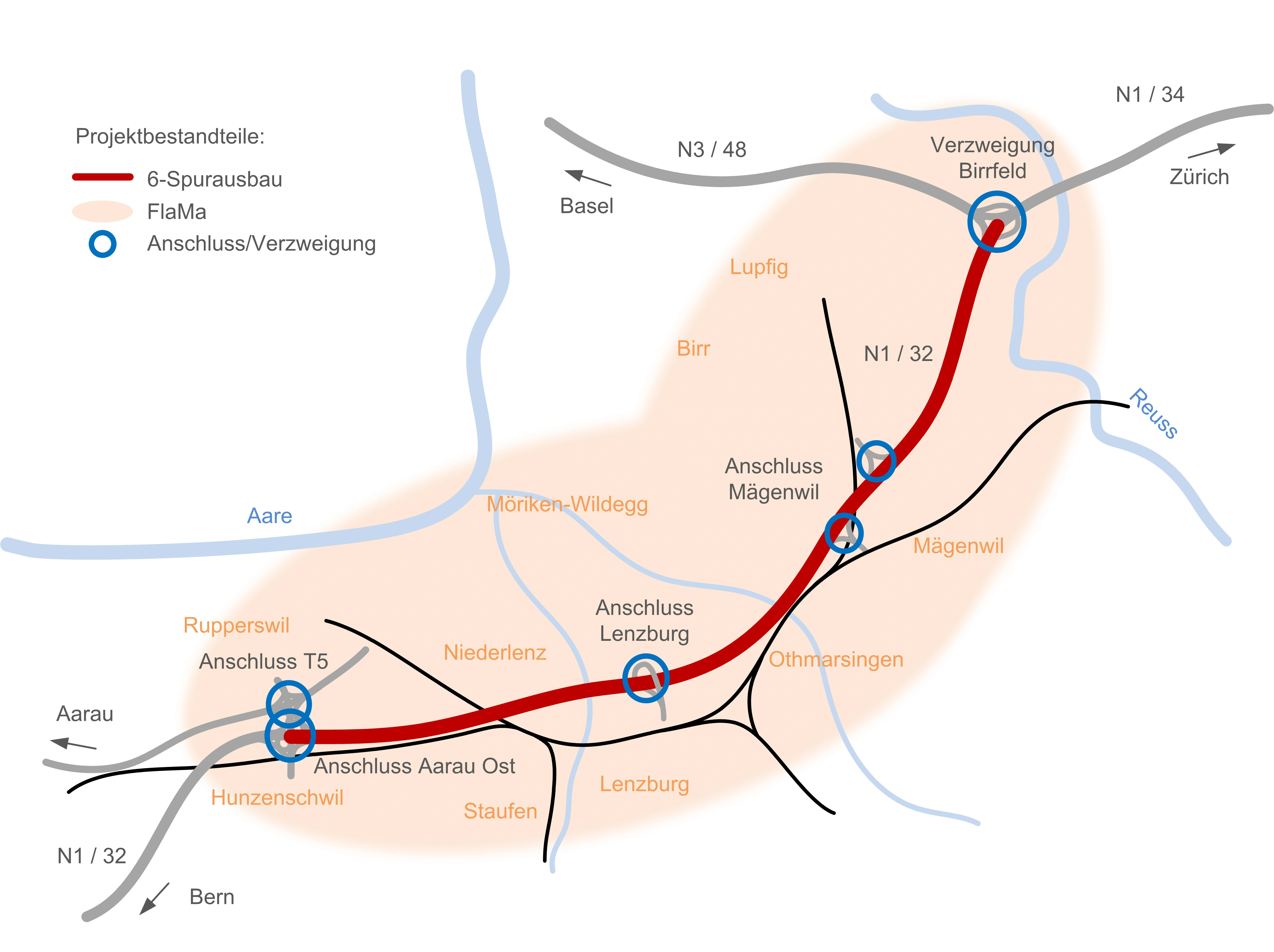
6-Streifenausbau Aarau Ost – Verzweigung Birrfeld – Bauherrenunterstützung
Industries:
Services: