Services
Helbling developed the autonomous interception algorithms, starting from the definition of core requirements through to successful real-life validation in close collaboration with CDDS.
Key Contributions
- Definition of core requirements and control architecture with a focus on low-latency guidance, robustness, cost-effectiveness and short development time
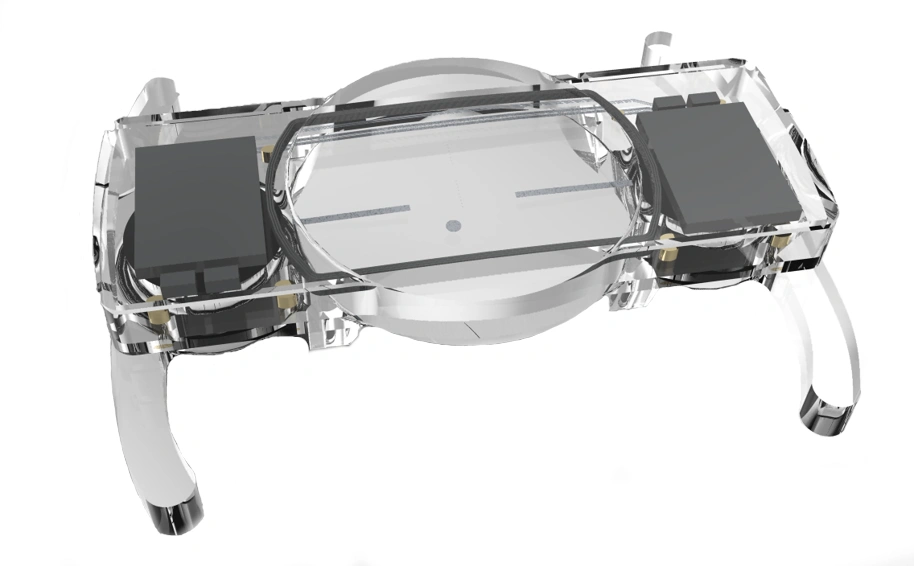
- Selection of camera and control hardware
- Simulation-based development of control software, structured into the following focus areas:
– Control: Interception control algorithm
– State Estimation: Kalman Filter fusion of IMU and
vision data
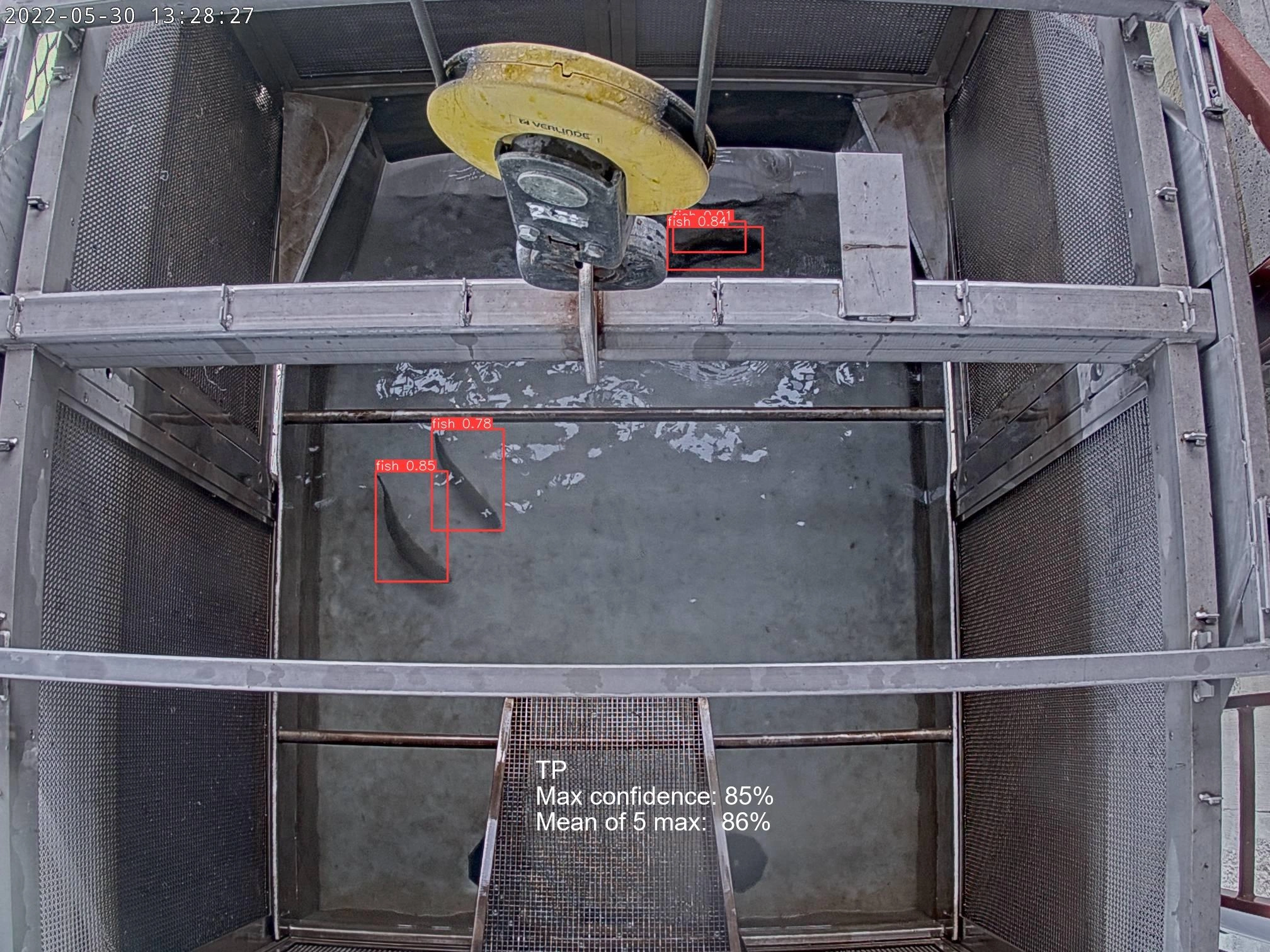
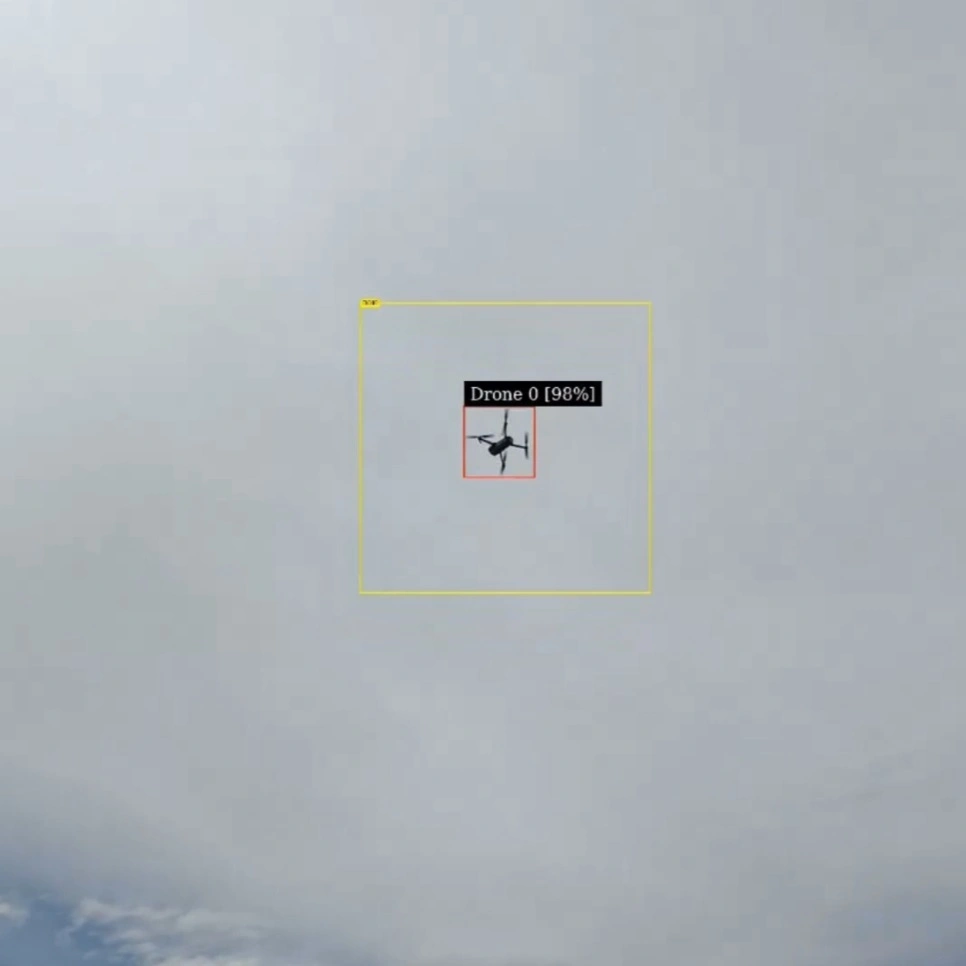
- Perception: AI-based drone detection and tracking
using YOLO neural network - Software integration on real drone hardware
- Field testing and finetuning
Development and testing results of C-UAV:
-> Click to play video below
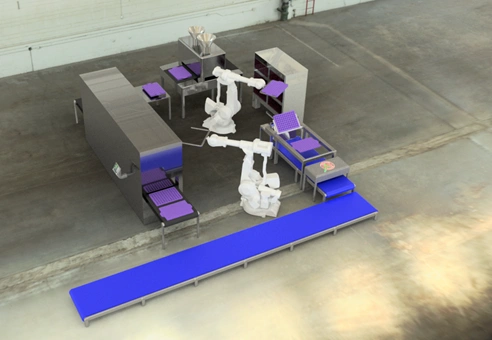
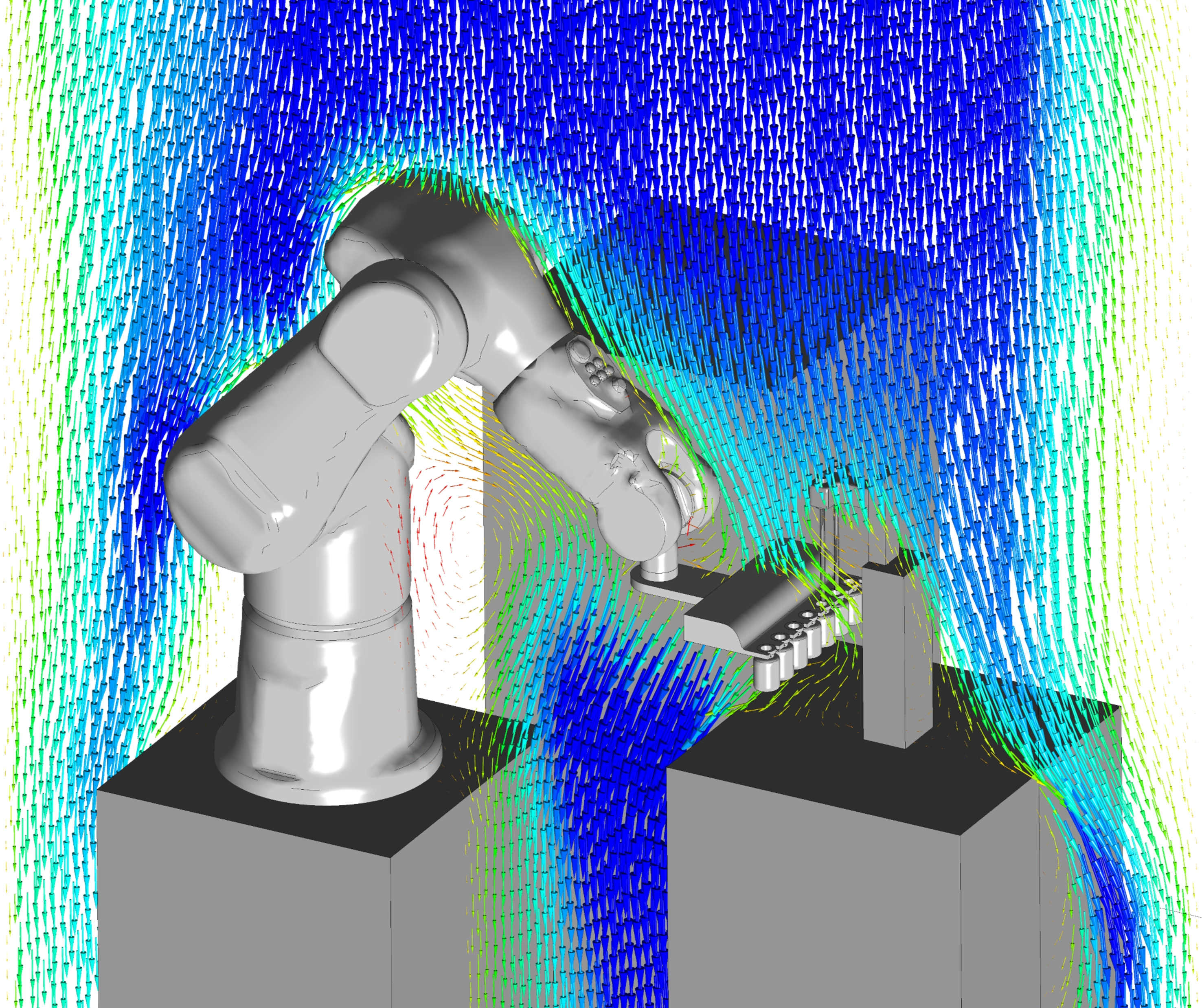
Robotics tools and simulation framework
- A modular development in simulation based on Gazebo, ROS2 and a PX4 allowed rapid prototyping, parallel development and software in the loop testing
- Tools like Foxglove enable in-depth analysis of recorded data
- Custom tools supported efficient development
– Data driven result analysis and performance visualization
– Automated parameter tuning and latency impact studies





























































































Cases
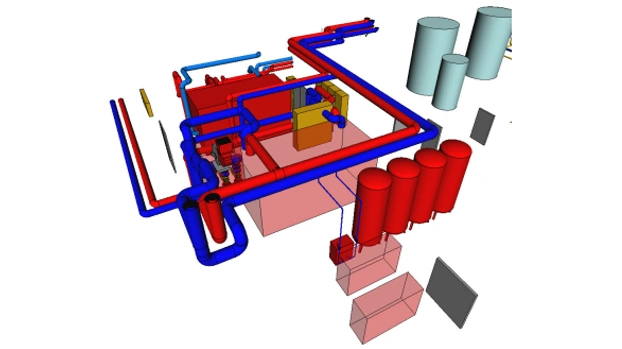
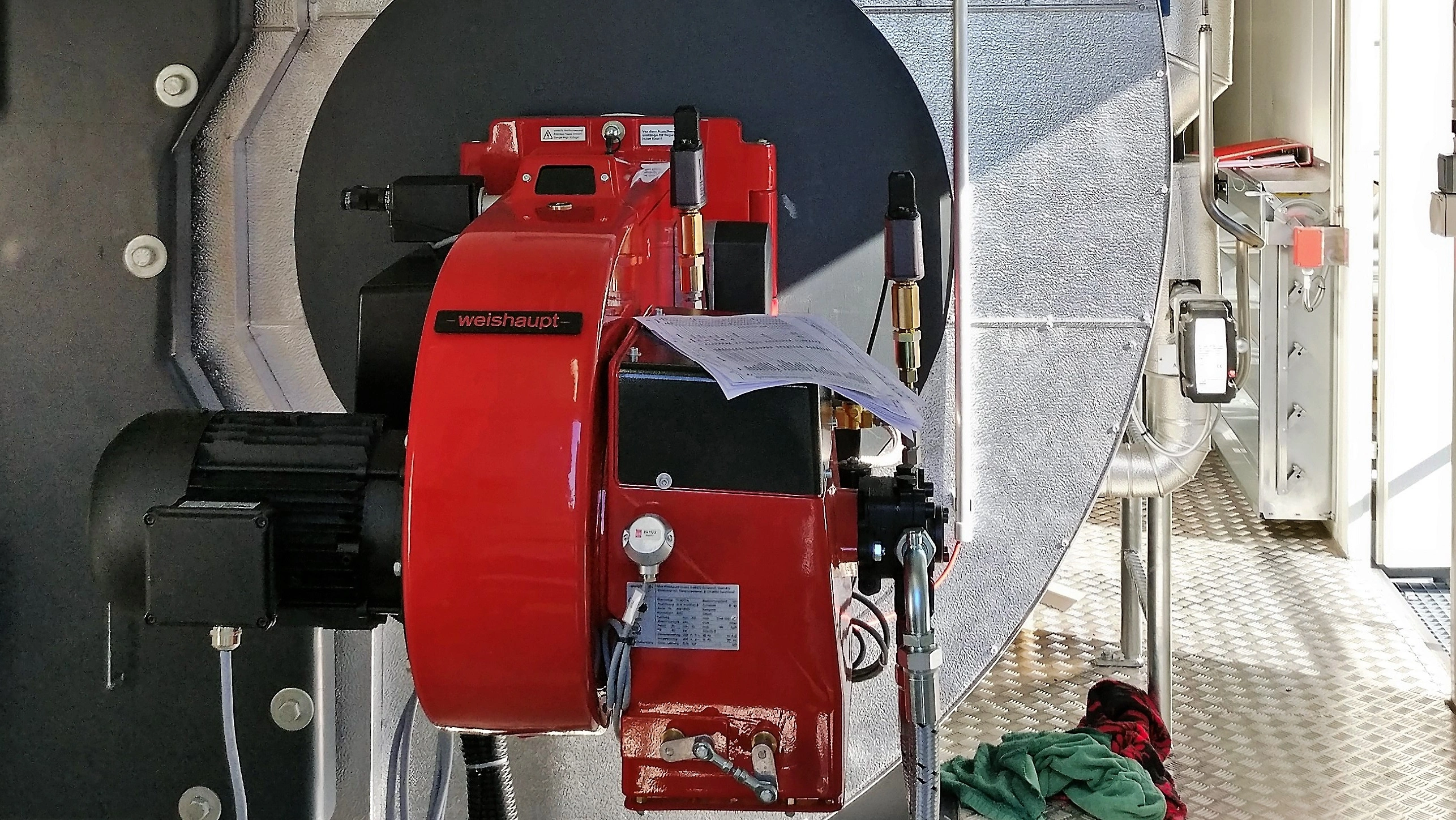
Internationales Unternehmen der Papierindustrie – Analyse des Dampfsystems
Industries:
Services:
























Cases
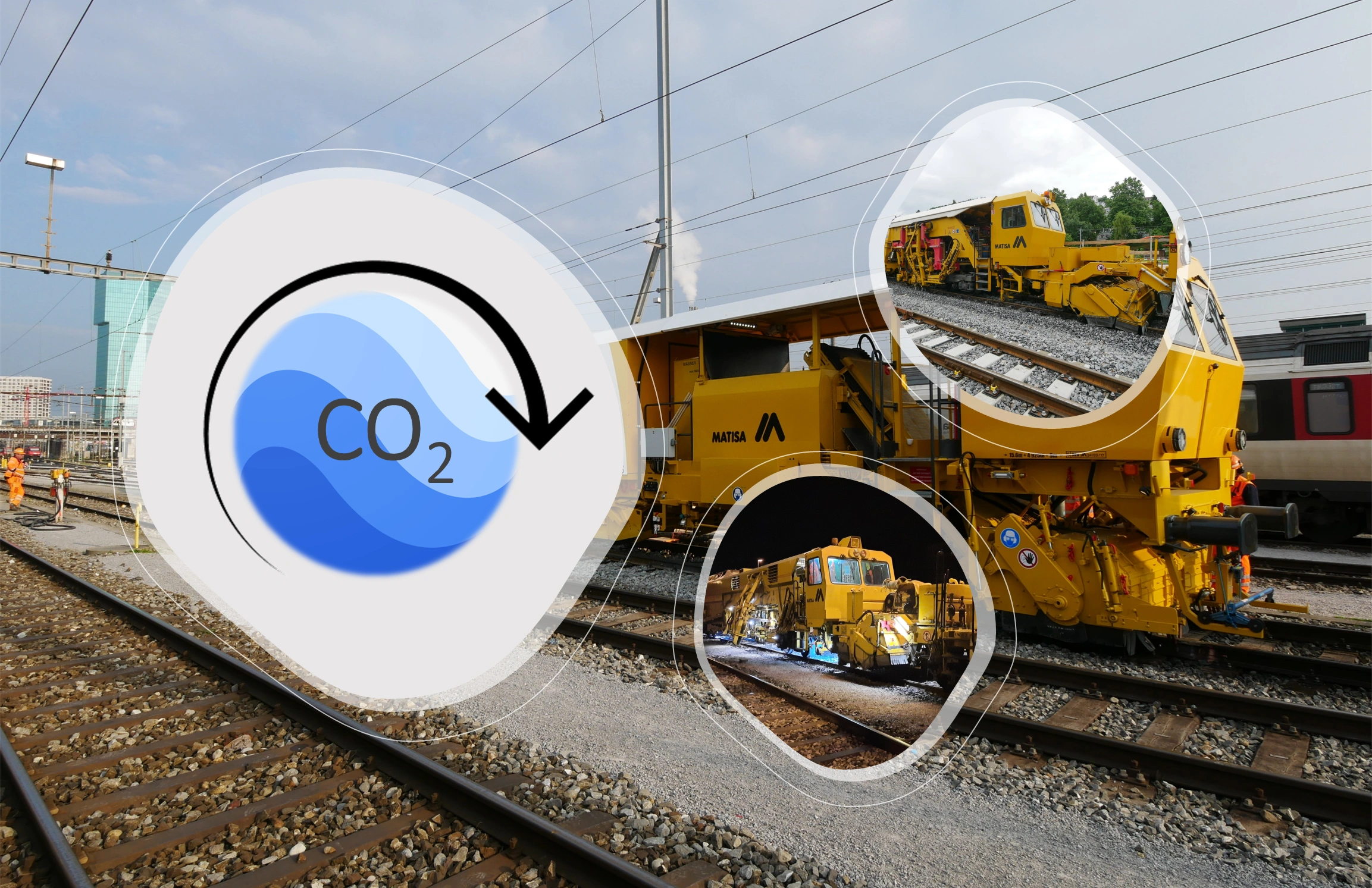
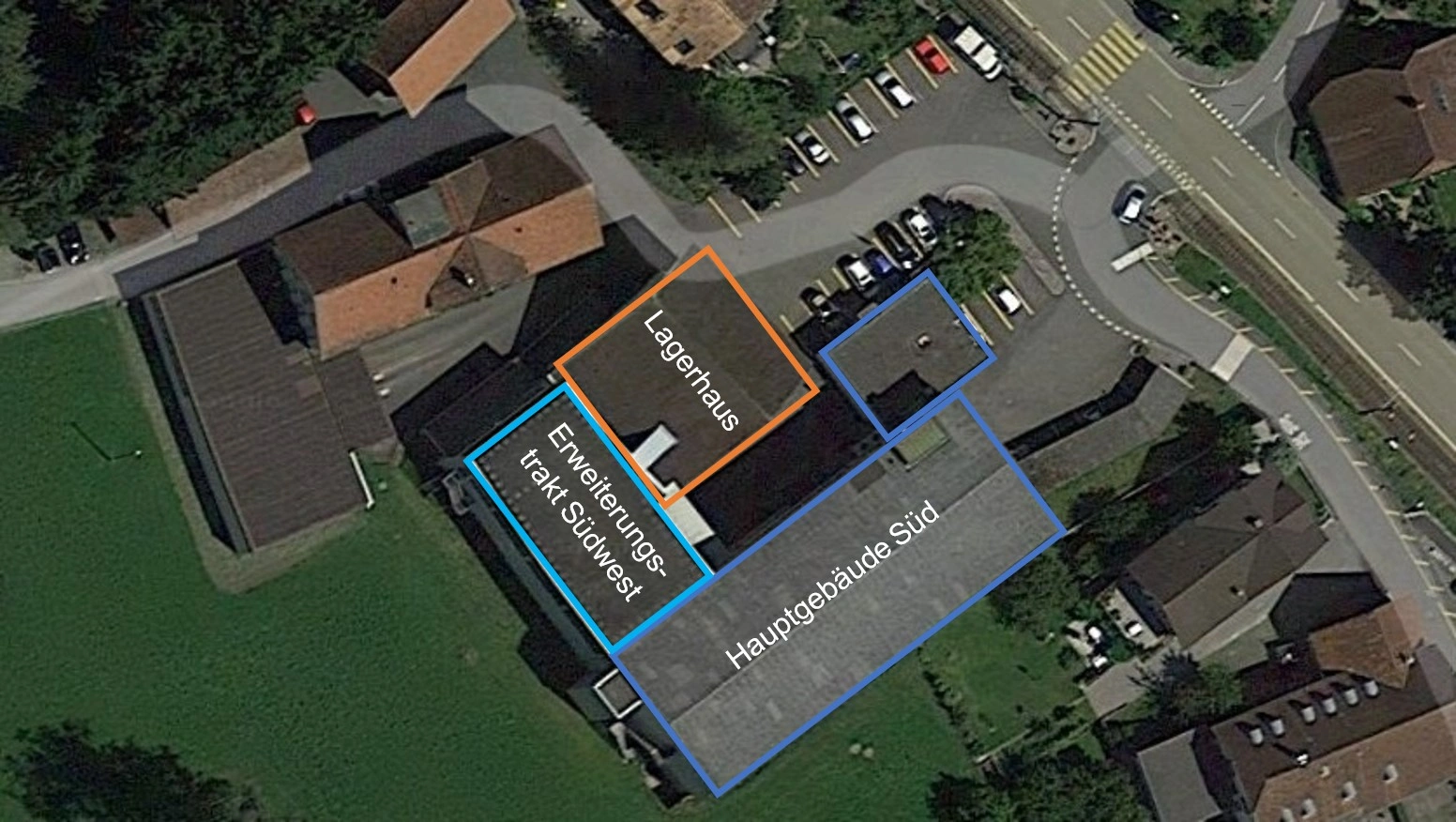
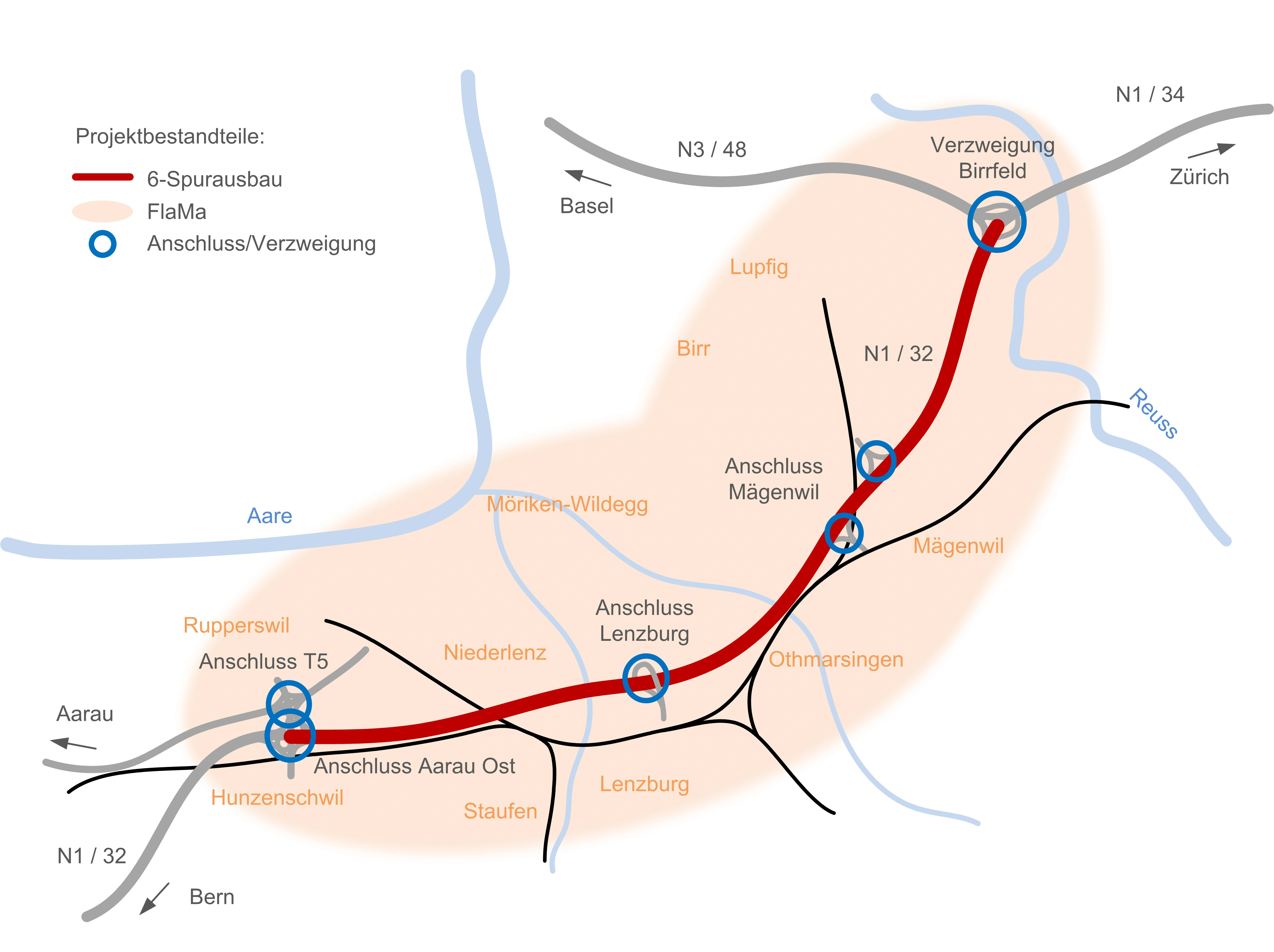
6-Streifenausbau Aarau Ost – Verzweigung Birrfeld – Bauherrenunterstützung
Industries:
Services: